快速了解一个网络:YOdar, Uncertainty-based Sensor Fusion for Vehicle Detection with Camera and Radar Sensors
快速了解一个网络:YOdar, Uncertainty-based Sensor Fusion for Vehicle Detection with Camera and Radar Sensors
以下内容偏向于记录个人学习过程及思考,请审慎阅读。
背景
提出一种radar-camera融合方式。
核心思想
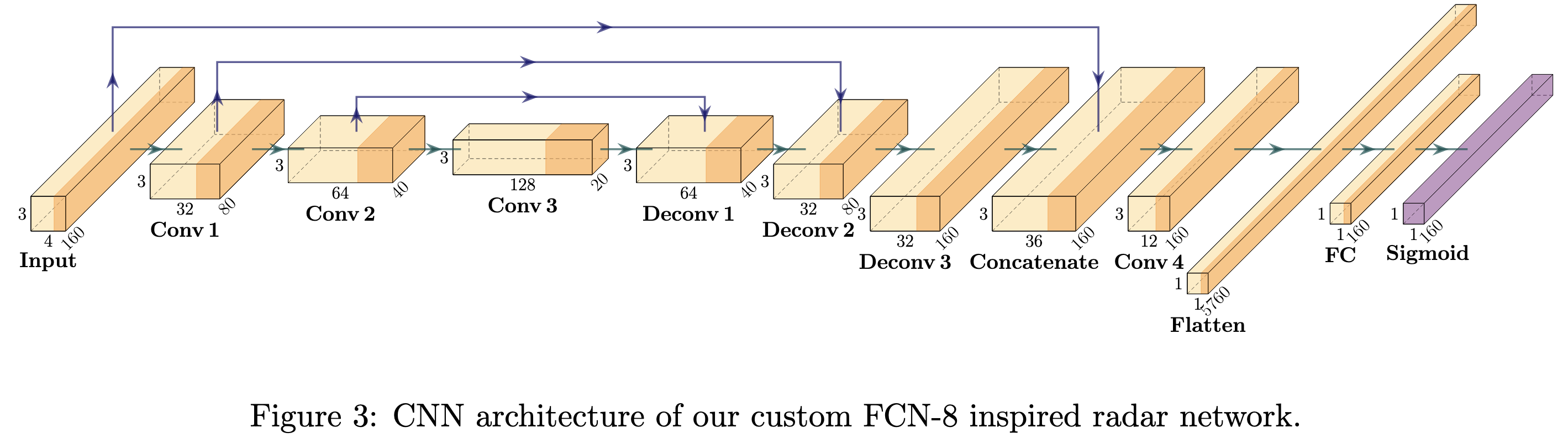
将图像切成多个slice,radar分支预测图像上每个slice的占据情况,本质是一个1d segmentation网络
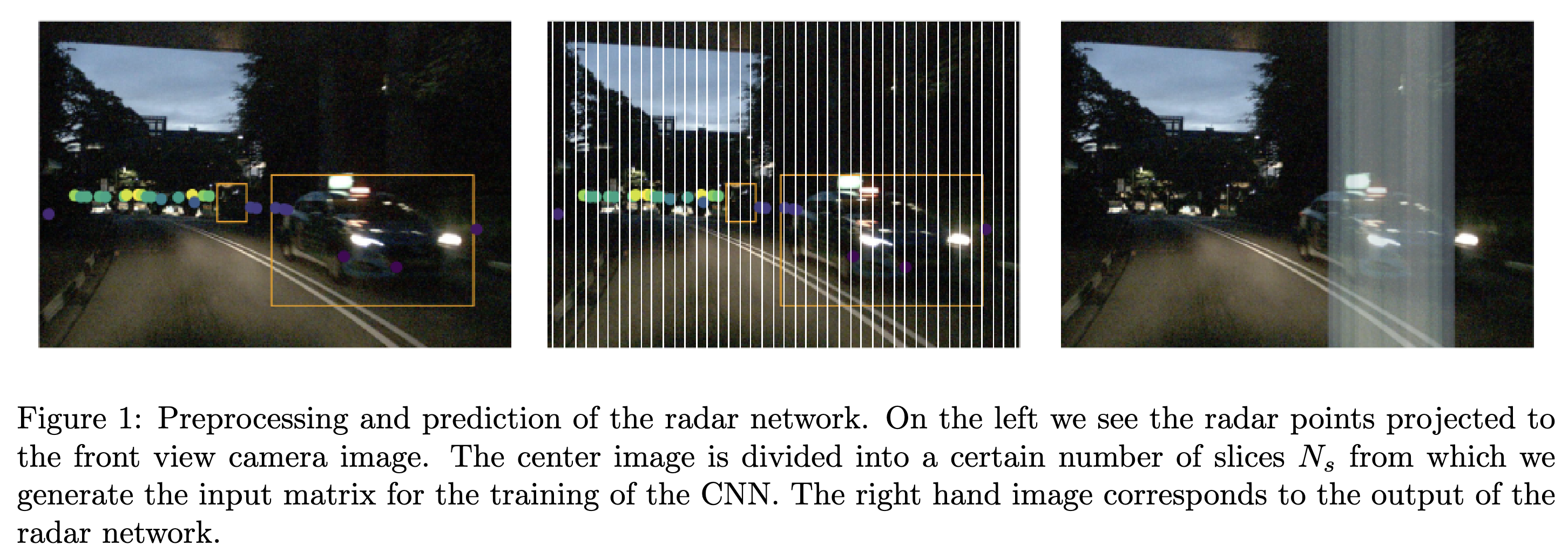
camera基于yolov3网络进行目标检测,通过调整阈值放出更多框。这些检测框用radar分支给出的1D标签向量进行重加权,从而达到融合的目的。
本质是一种后融合的方式,不同传感器输出结果的关联是在图像视图下完成的。
Pipeline
进一步了解
- yolov3
- gradient boosting
原文和代码
https://arxiv.org/abs/2010.03320
参考资料
本文由作者按照 CC BY 4.0 进行授权