快速了解一个网络:RVNet, Deep Sensor Fusion of Monocular Camera and Radar for Image-Based Obstacle Detection in Challenging Environments
快速了解一个网络:RVNet, Deep Sensor Fusion of Monocular Camera and Radar for Image-Based Obstacle Detection in Challenging Environments
以下内容偏向于记录个人学习过程及思考,请审慎阅读。
背景
基于camera的目标检测算法在低照明度、雨雪天气容易表现不佳
radar可以很好的应对这类场景,但radar的点云又比较稀疏,很难勾勒出目标的几何信息。
核心思想
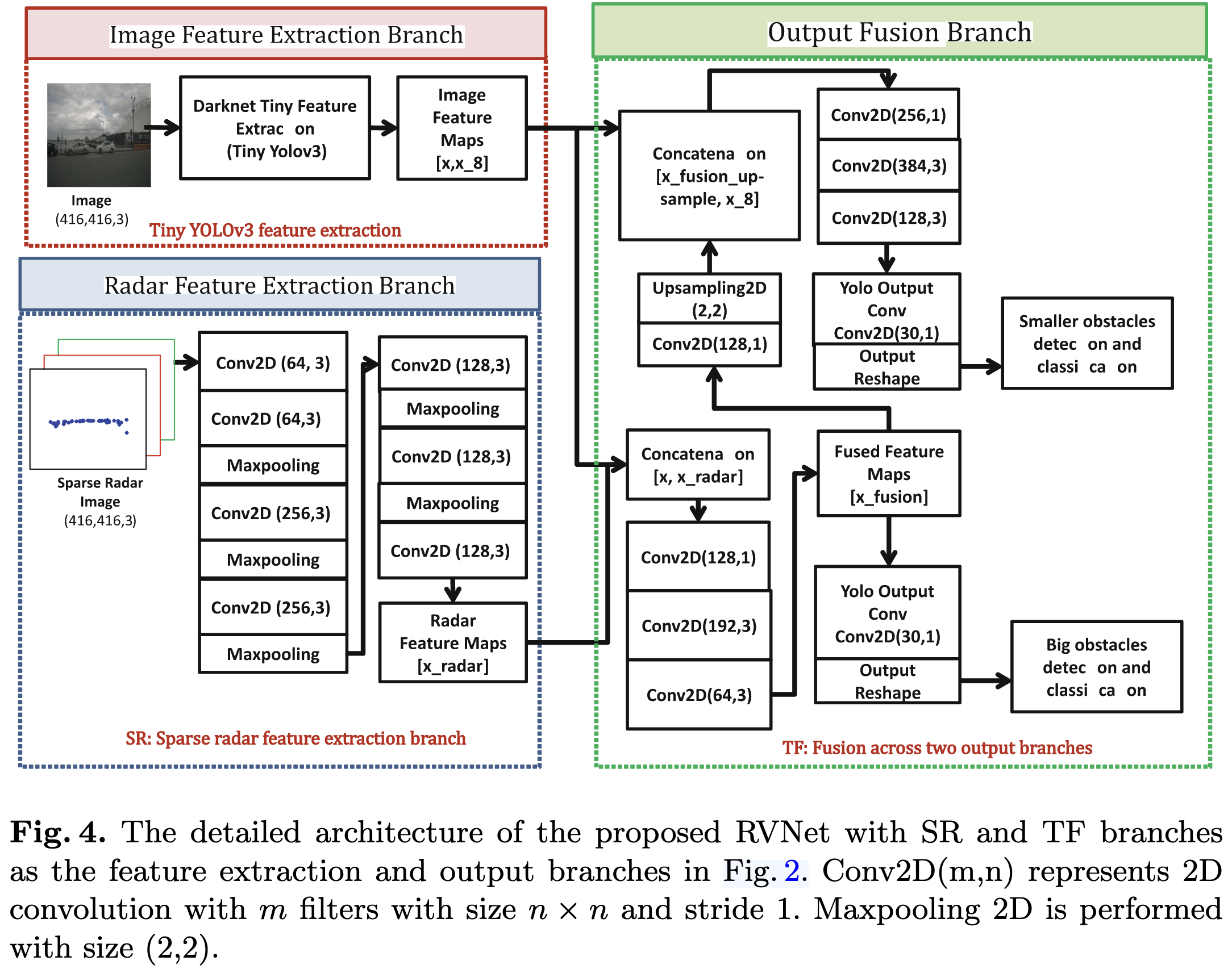
提出一种radar camera融合的方案。
将radar点云通过radar to camera外参 + camera内参投影到camera图像上,建立sparse radar image,每个点包含radar的深度和横纵向速度信息。
分别对camera image和sparse radar image通过cnn的方式提取feature,再通过concatenation的方式融合,进而再进一步通过cnn的方式提取融合后的feature。
Pipeline
亿些细节
- 作者基于nuScenes数据集进行实验
- image feature提取的部份采用了yolov3-tiny的结构,并使用了基于Pascal VOC数据集的pretrained权重。
- 因为radar image比较稀疏,作者使用了stride为1的卷积核,把所有radar feature都考虑上
- radar feature是基于随机权重开始训练的。
- 作者也提到一种dense的radar image方式。
- 作者将固定169个radar点云排成13x13的矩阵,每个点代表一个点云,其包含深度、横纵向速度、反投图像上的uv共五个量(类似于稀疏矩阵的表达方式)
- 作者提到几种输出的变种
- 包括大小障碍物的输出主要靠融合结果还是camera结果
- 输出障碍物类别是二分类还是多分类等
- 作者发现radar-camera融合的二分类效果提升比较明显
进一步了解
- yolov3-tiny
原文和代码
本文作为一篇会议论文收录在一本书里,可以考虑通过libgen下载
- Image and Video Technology (PSIVT 2019), pp. 351-364
参考资料
无
本文由作者按照 CC BY 4.0 进行授权