快速了解一个网络:Radar-Camera Pixel Depth Association for Depth Completion
快速了解一个网络:Radar-Camera Pixel Depth Association for Depth Completion
以下内容偏向于记录个人学习过程及思考,请审慎阅读。
背景
基于radar-camera fusion生成pixel级别的深度估计。
核心思想
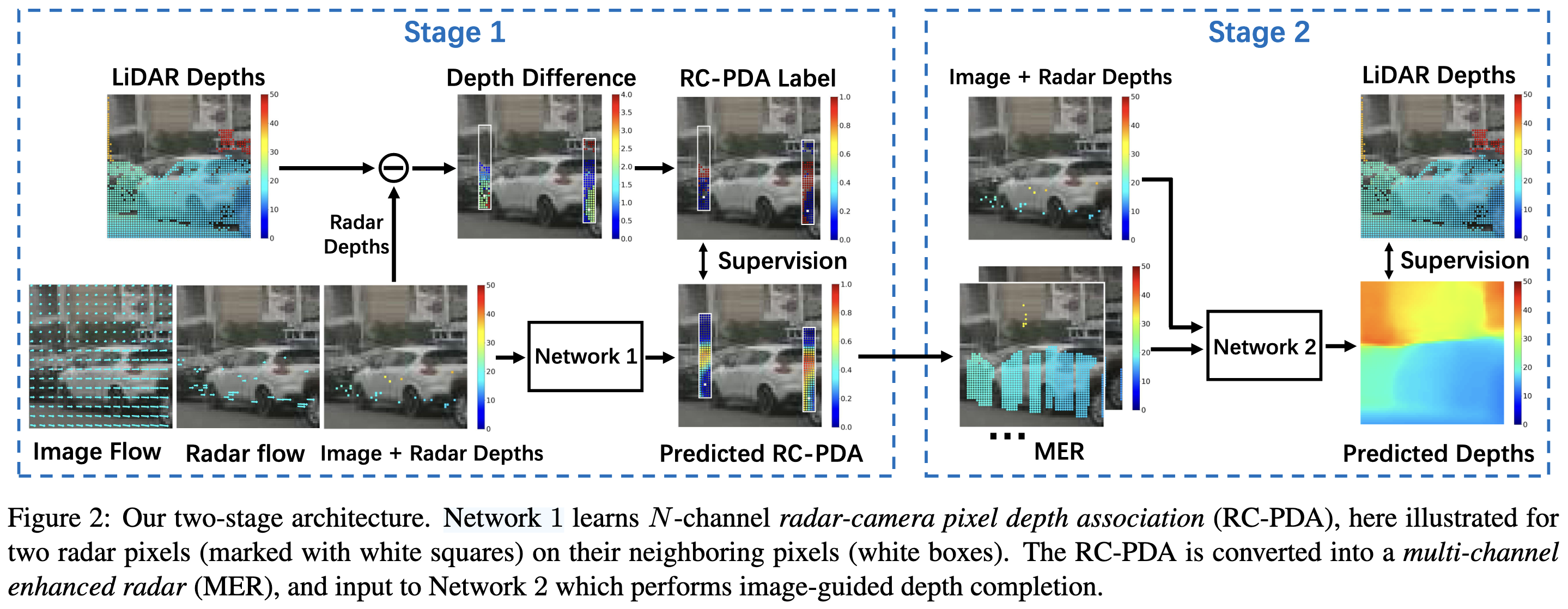
二阶段算法。
第一阶段,将radar点与附近的image pixels进行关联
第二阶段,基于关联后的radar-camera进行完整的深度估计
使用lidar点云作为深度监督真值。
Pipeline
亿些细节
Radar-Camera Pixel Depth Association: RC-PDA Model
主要是为了解决:哪些image pixels与radar点关联。
对于radar点附近的一个patch,如果其中lidar点的深度和radar点深度差别小于一定阈值,或相对深度差别(归一化)小于一定阈值,则对应位置pixel的label为1,否则为0。
用weighted binary cross entropy loss来计算预测值和label的差,其中weight为
- 当绝对深度和相对深度均小于阈值时,weight为1;
- 否则weight为0
Multi-Channel Enhanced Radar (MER)
RC-PDA Model会针对每个radar pixel预测附近image pixel的深度。如果同一个image pixel被多个radar pixel关联,则取RC-PDA Model置信度最高的预测。
通过设定不同的阈值,我们可以获得多种不同阈值下的depth map,组成多个channel
进一步了解
无
原文和代码
https://arxiv.org/abs/2106.02778
参考资料
无
本文由作者按照 CC BY 4.0 进行授权