快速了解一个网络:Radar-Camera Sensor Fusion for Joint Object Detection and Distance Estimation in Autonomous Vehicles
以下内容偏向于记录个人学习过程及思考,请审慎阅读。
背景
多传感器信息可以很好的互相补足劣势,但是设计好的融合算法却比较难。
融合radar相比于融合lidar有两个优势
- radar点比较稀疏,一个到几个radar点就对应一个目标,相比于lidar更有效
- radar点包含的信息也比较直接,包括目标距离、目标速度
本文提出一种新的radar-camera fusion算法
核心思想
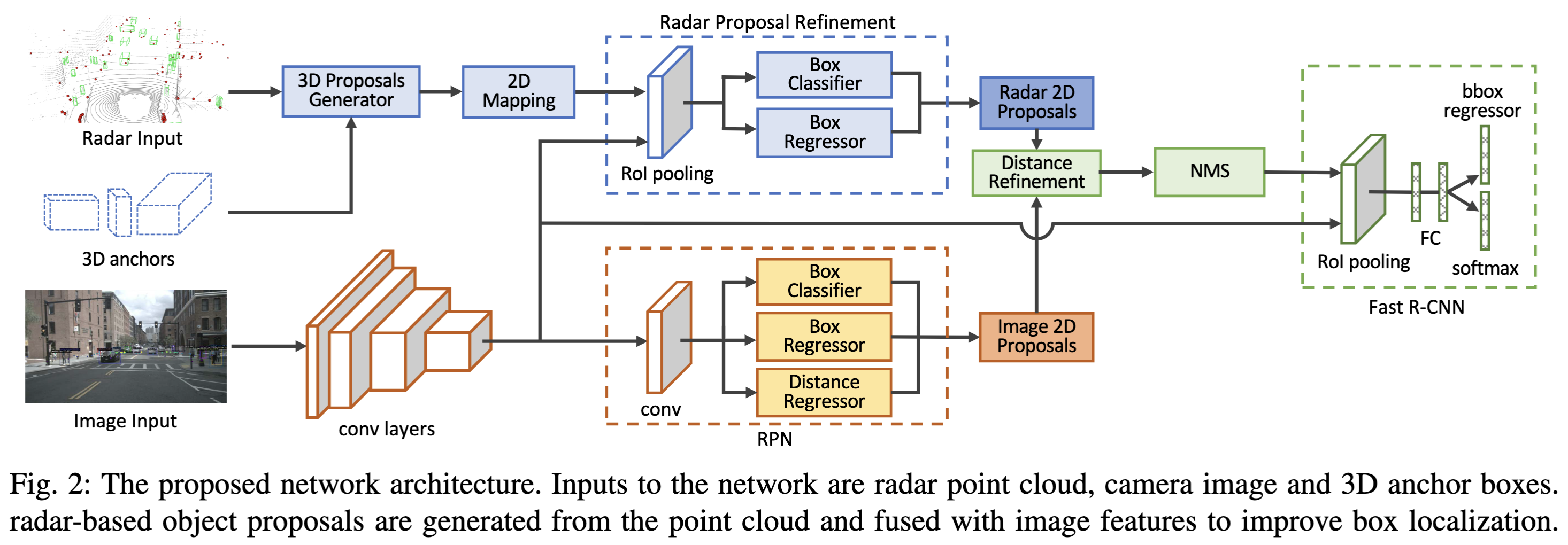
设计二阶段目标检测网络,首先基于radar点云和类别先验尺寸给出带深度的3d object proposals,再反投camera上得到2d proposals,并用2d image features进行refine,最后与image的2d object proposals作nms后一起送到后续网络进行目标检测。
Pipeline
亿些细节
Radar Proposal Network
作者直接将radar点云作为直接的检测来生成proposals,而不使用相关feature提取。
anchor的size根据相关类别的先验尺寸设置
anchor朝向仅设置两个角度,即0°和90°
anchor的位置中心直接使用radar点在vehicle系的坐标(个人疑问:radar一般是目标车的最近点?
所有3d anchors再通过内外参反投到camera image上得到带深度信息的2d anchors
并且由于有深度信息 + 类别的先验尺寸,生成的2d anchors可以比较好的反馈相关类别在2d图像上的真实尺寸
因为radar点通常只存在于路平面上的目标,因此自然地忽略掉了很多不必要处理的背景区域
接着作者通过一个Radar Proposal Refinement (RPR)模块,结合proposals内的image features来调整anchors的位置和尺寸,同时也会回归一个有无目标的概率。
因为radar proposals拥有不同的size,这里作者采用了roi pooling进行维度对齐。
Image Proposal Network
对于某些类别的目标(如行人等),radar点云有可能覆盖不到,因此给不出有效的proposals
但radar可以给出一些远距离小目标的proposals
因此作者保留了image proposals,与radar proposals结合后可以获得比较全的结果
为了对每个proposal都估计深度,作者针对image proposals单独增加了一部份网络结构用于深度估计
Distance Refinement
因为image proposals的深度估计必然存在较大的误差,因此作者在nms前,先将image proposals和radar proposals通过iou关联,进而将image proposals的深度用radar深度覆盖。
Dataset and Implementation Details
作者使用nuScenes作为数据集,FPN with ResNet-50作为backbone,预训练权重基于ImageNet数据集。
同其它文章做法,作者将nuScenes中的3d标注通过内外参反投到图像上得到2d标注
作者表明并没有使用任何data augmentation因为每个类别的数据量已相对足够。
进一步了解
原文和代码
https://arxiv.org/abs/2009.08428
参考资料
无