快速了解一个网络:Point Pillars
快速了解一个网络:Point Pillars
以下内容偏向于记录个人学习过程及思考,请审慎阅读。
背景
背景是 lidar 3d 目标检测。
- 一些工作是将 3d lidar 点云投影到bev视角,再利用 2d cnn 网络进行检测。但由于点云的稀疏特性,这种做法效果并不好。
- 另外一些工作推广使用 3d 卷积核进行 3d 目标检测,但显然计算效率和计算量是瓶颈。
核心思想
设计了一种 3d lidar 点云的 encoder,转换为了 pseudo image,再针对转换后的 image 利用成熟的 2d cnn 网络进行目标检测。
Pipeline
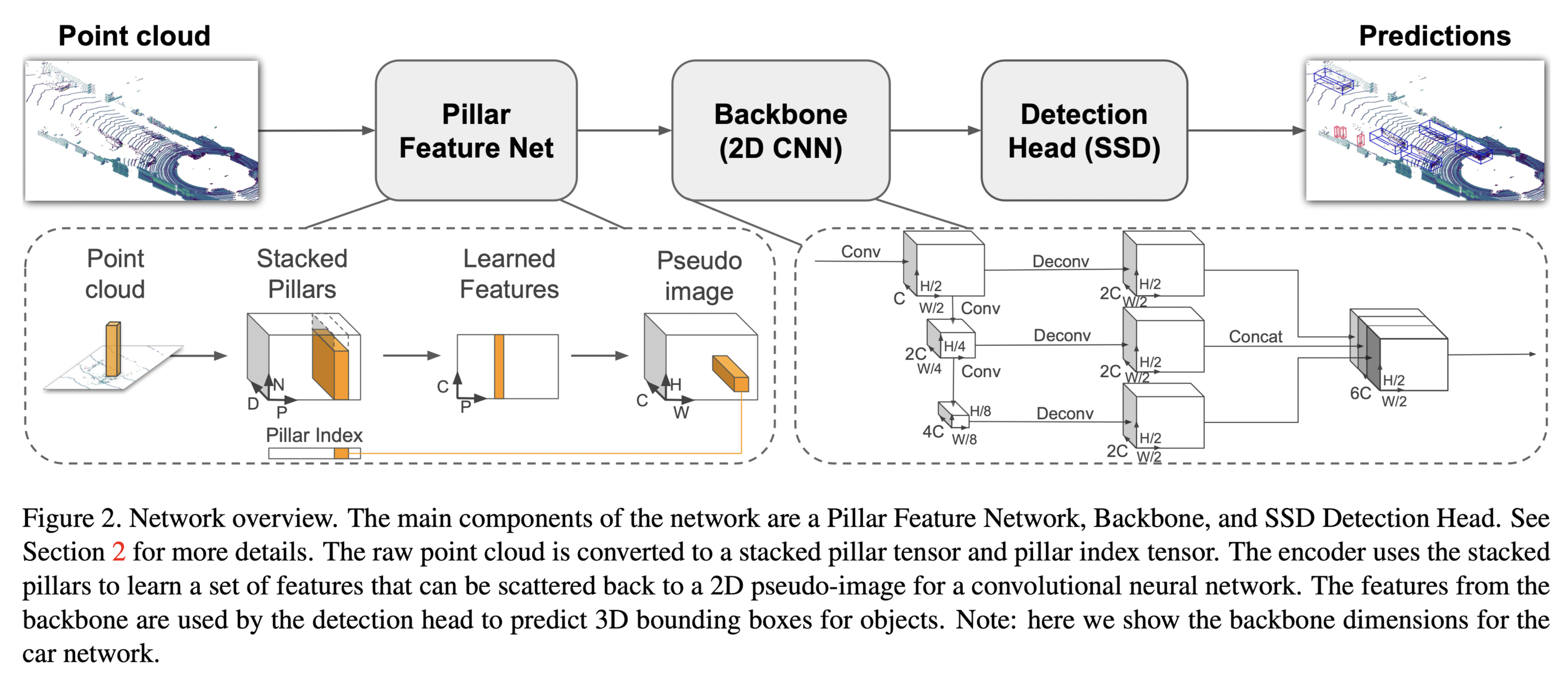
核心是 Pillar Feature Net 的转换过程。
亿些细节
Pointcloud to Pseudo-Image
将 3d lidar 点云,在 x - y 平面上划分为 H x W = P 个 grid,每个 grid 内的点云则形成了一个 pillar。
每个 pillar 中取 N 个点为代表,若点云较稠密则采样,若点云较稀疏则补0
每个点用一个 D = 9 维的 vector 表示,分别为
- 该点自身的位置坐标 x, y, z
- 该点的反射强度 r
- 该点距离 pillar 中所有点算术平均位置的距离 x, y, z
- 该点距离 pillar x - y 平面中心点的距离 x, y
因此就得到了一个 D x P x N 的 tensor,用来表示 3d lidar 点云
对于每个点,经过 Linear layer,BatchNorm,ReLU 后转换为 C x P x N 的 tensor (D -> C)
对于每个 pillar 中的 N 个点作 max 操作,去除 N 这一维,可得到 C x P 的 tensor
将 P 个 pillar 按照之前 H x W 个 grid 的位置还原回去,即可以得到 C x H x W 的 tensor
即 pseudo image 的形式。
进一步了解
- PointNet
- VoxelNet
- SECOND
- Focal loss
- Deconv
原文和代码
https://arxiv.org/abs/1812.05784
https://github.com/nutonomy/second.pytorch
参考资料
本文由作者按照 CC BY 4.0 进行授权