快速了解一个网络:Distant Vehicle Detection Using Radar and Vision
快速了解一个网络:Distant Vehicle Detection Using Radar and Vision
以下内容偏向于记录个人学习过程及思考,请审慎阅读。
背景
基于camera的cnn系列目标检测网络对于小目标的检测效果较差(即对于远距离的目标检测效果较差)。
本文考虑通过radar的信息(尤其是动态目标的多普勒信息)来辅助远距离目标的检测。
核心思想
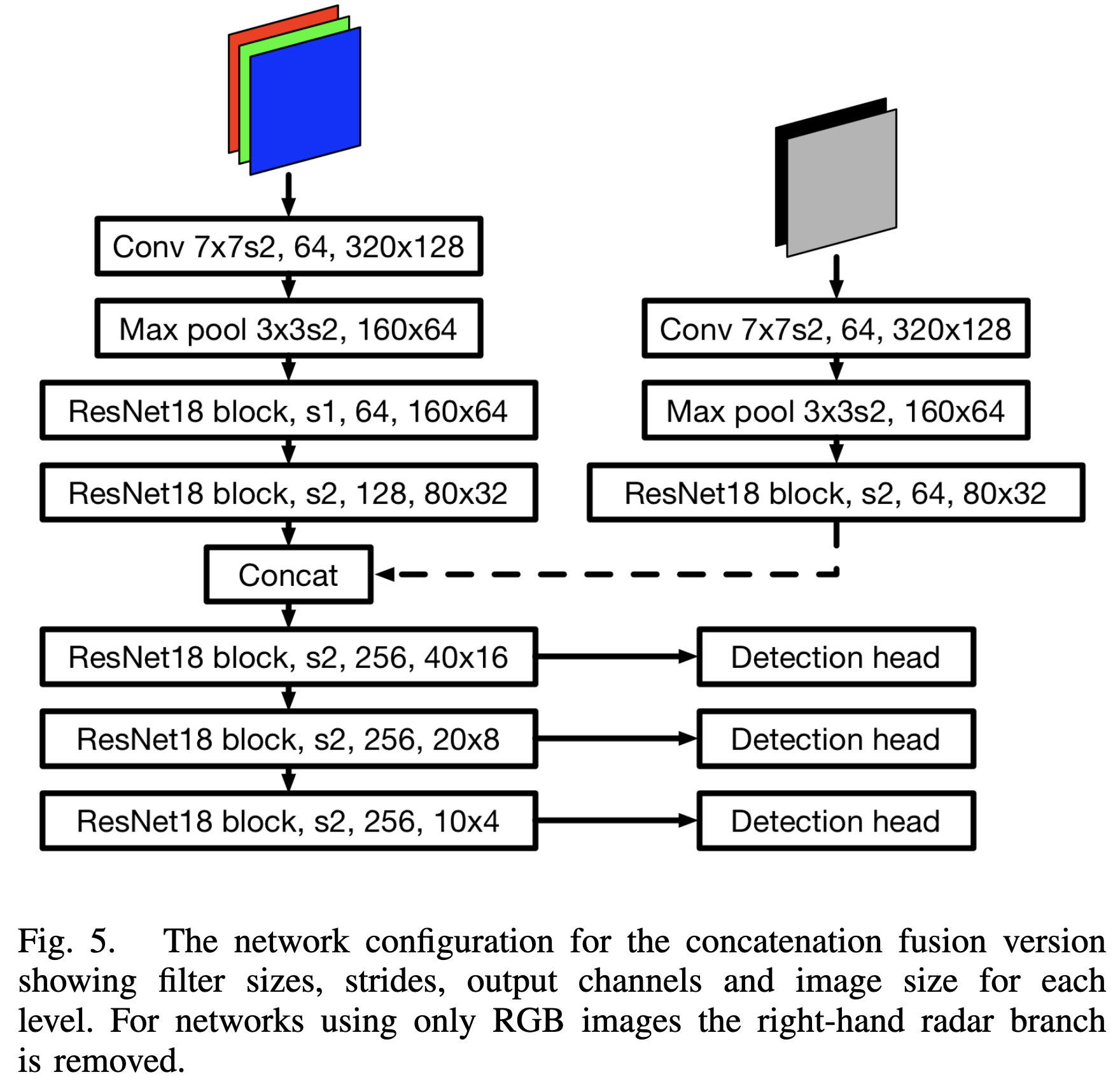
将radar的点云根据相机内外参反投到图像上,通过concatenation的方式融合,相当于给图像features增加2个channel
2个channel分别对应radar的位置信息和radar的多普勒频移信息。
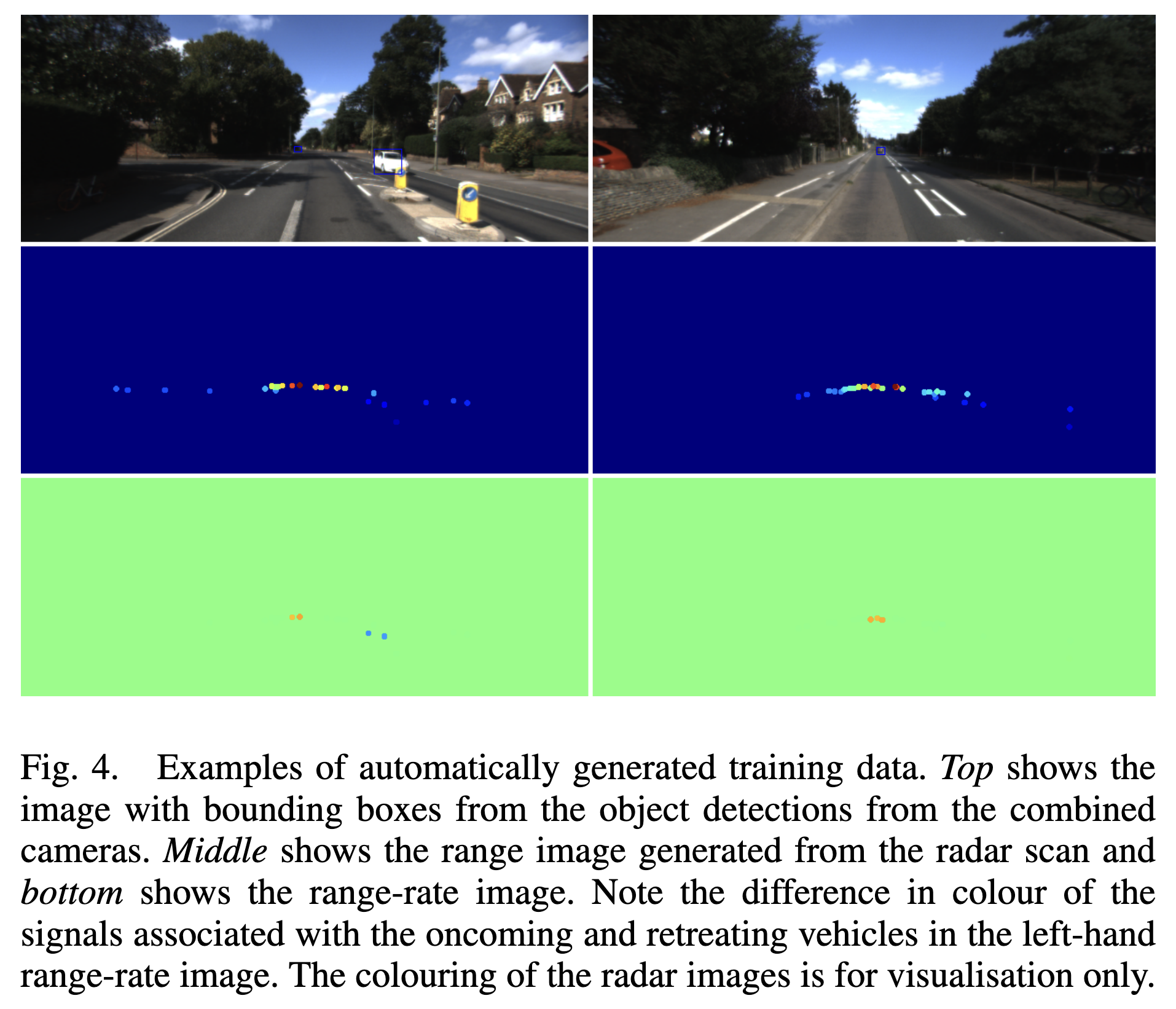
远距离目标真值方面,通过对一个长焦镜头的图像用yolo网络进行目标检测来生成(2d detection)。
Pipeline
亿些细节
- 作者也使用的私有数据集,因为特殊的需求
- 1个长焦(辅助远距离真值生成),2个短焦(构成stereo camera模拟实际车辆传感器构型,也通过stereo visual odometry用作ego motion的估计),1个radar
- 其中长焦和其中1个短焦镜头尽可能的靠近以近似满足共用相机中心的假设,在不需要知道目标真实距离的情况下将长焦图像检测的uv近似反投到短焦图像uv,简化真值获取过程。
- 通过基于kitti数据集训练的yolo网络,在采集的数据集上产生伪标注结果当作真值
- 产生伪标注过程中,对于短焦图像的检测结果,如果和长焦检测结果iou大于0.5则弃用短焦镜头检测结果
- 在将radar点云反投图像时,反投结果采用了一个临近的圆形区域而非单个pixel,这样可以一定程度上增加radar点对训练结果的影响,也可以在一定程度上反应radar位置的不确定性。
- 因为camera采样频率(30hz)和radar采样频率(20hz)都很高,相邻帧几乎没有差别,所以作者做了进一步的下采样,采用camera和radar间delay尽可能小的帧 + 进一步下采样结果进行训练。
- 因为自采数据vehicle占了大部份,因此后文只focus vehicle部份的结果(估计是其他类别效果不佳)
- 检测框架使用SSD
- 因为SSD对于更小目标的检测效果较差,这里作者借鉴了Detecting traffic lights by single shot detection的思路,通过重复default boxes的方式来提升小目标检测效果。
- 作者提出了2个进一步的研究方向
- 本文还是简单的将radar点云反投图像,作为图像来处理,没有很好的利用radar点云的稀疏特性。
- 本文没有利用时序信息,作者认为时序信息对于目标检测有很好的作用,尤其是可以过滤radar的一些噪声等。
进一步了解
- SSD
- Detecting traffic lights by single shot detection
原文和代码
https://arxiv.org/abs/1901.10951
参考资料
无
本文由作者按照 CC BY 4.0 进行授权