快速了解一个网络:CFTrack, Center-based Radar and Camera Fusion for 3D Multi-Object Tracking
快速了解一个网络:CFTrack, Center-based Radar and Camera Fusion for 3D Multi-Object Tracking
以下内容偏向于记录个人学习过程及思考,请审慎阅读。
背景
提出一种端到端的、基于radar-camera融合的多目标检测-跟踪联合模型。
核心思想
结合CenterFusion和CenterTrack的思路
魔改CenterFusion输入,支持增加上一帧的camera、radar和目标检测结果同时作为输入。
基于融合的radar-camera features,输出部份增加预测一个上一帧目标与当前帧目标的偏置displacement(类似于用网络来代替tracking中的预测部份)
再基于贪心算法实现关联部份以达到tracking的目的。
Pipeline
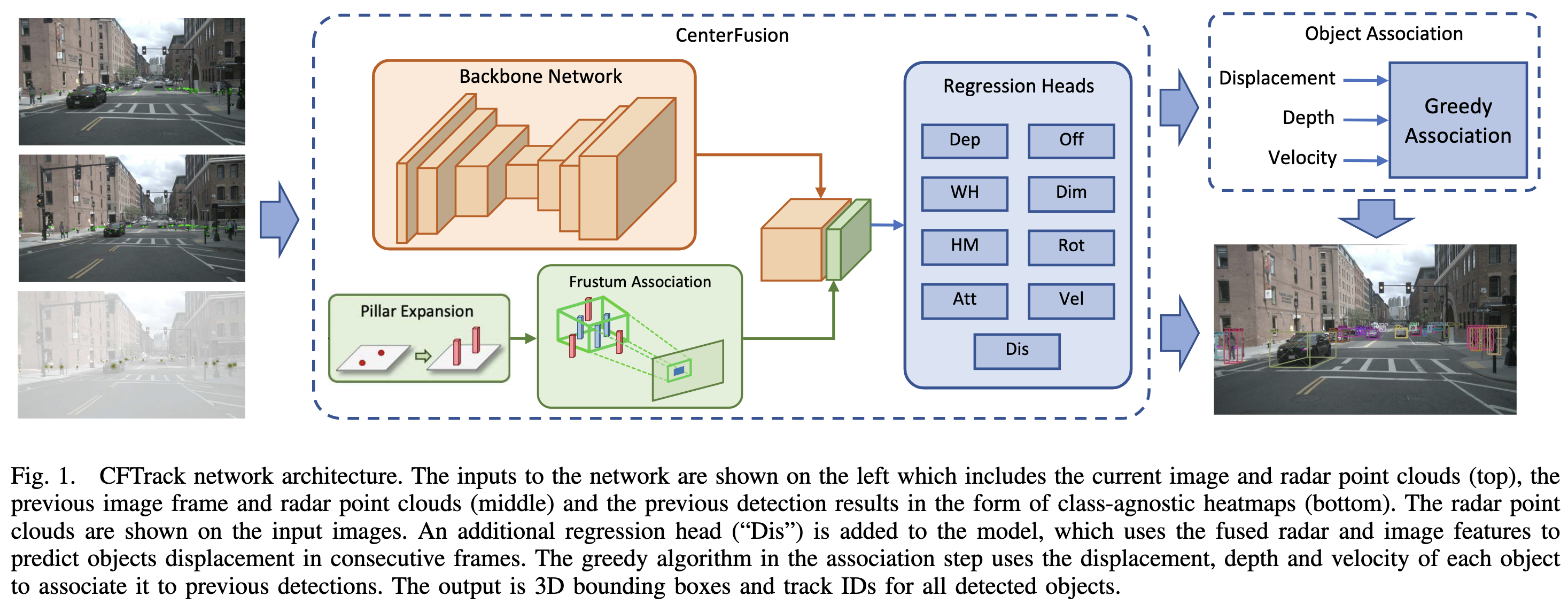
亿些细节
Detection Network
上一帧的目标检测结果,通过基于中心点的2d-Gaussian核产生heatmap,作为一个channel输入给网络。
进一步了解
- CenterFusion
- CenterTrack
原文和代码
https://arxiv.org/abs/2107.05150
参考资料
无
本文由作者按照 CC BY 4.0 进行授权