快速了解一个网络:BIRA Net, Radar+RGB Attentive Fusion For Robust Object Detection In Autonomous Vehicles
快速了解一个网络:BIRA Net, Radar+RGB Attentive Fusion For Robust Object Detection In Autonomous Vehicles
以下内容偏向于记录个人学习过程及思考,请审慎阅读。
背景
融合radar and camera以获得更鲁棒的目标检测网络。
核心思想
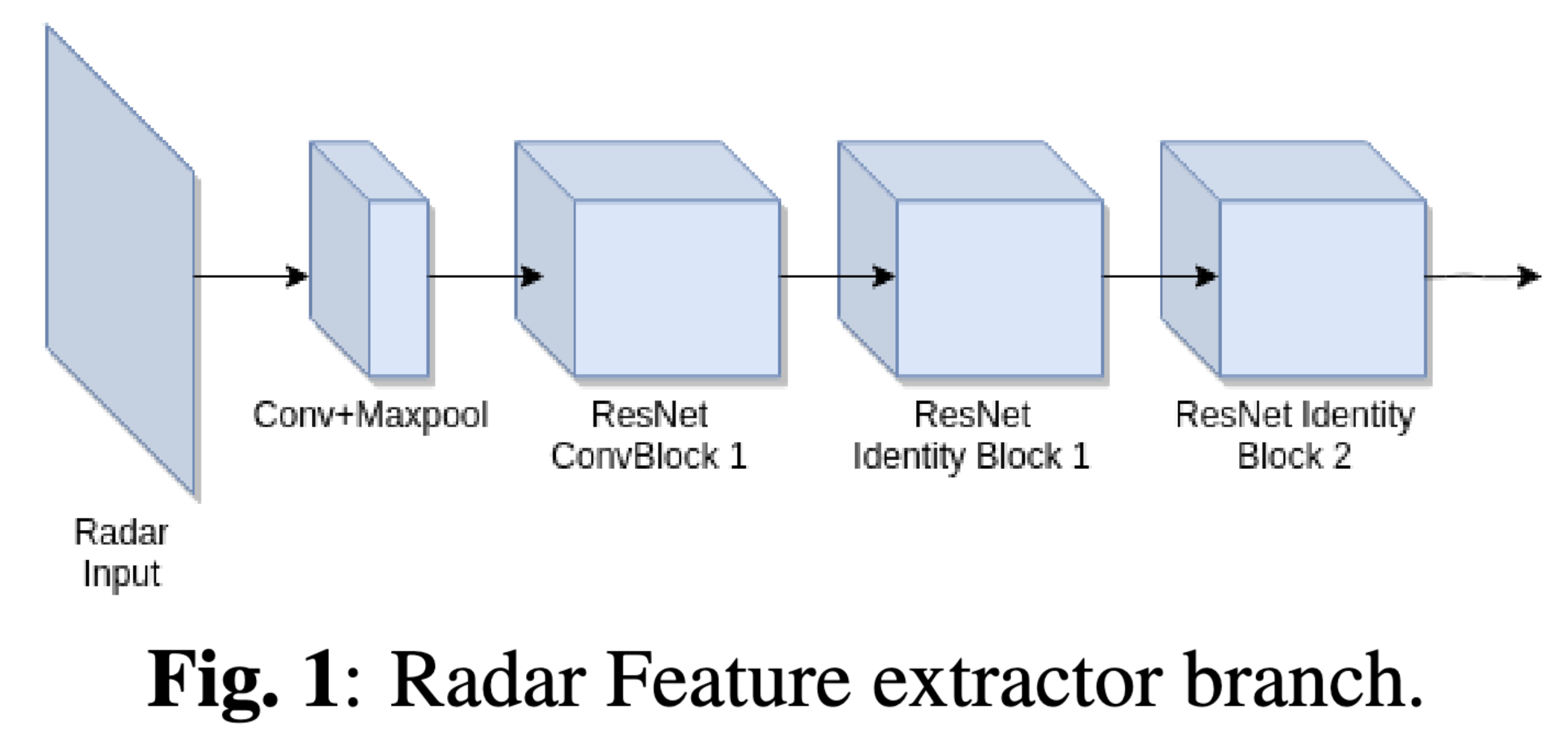
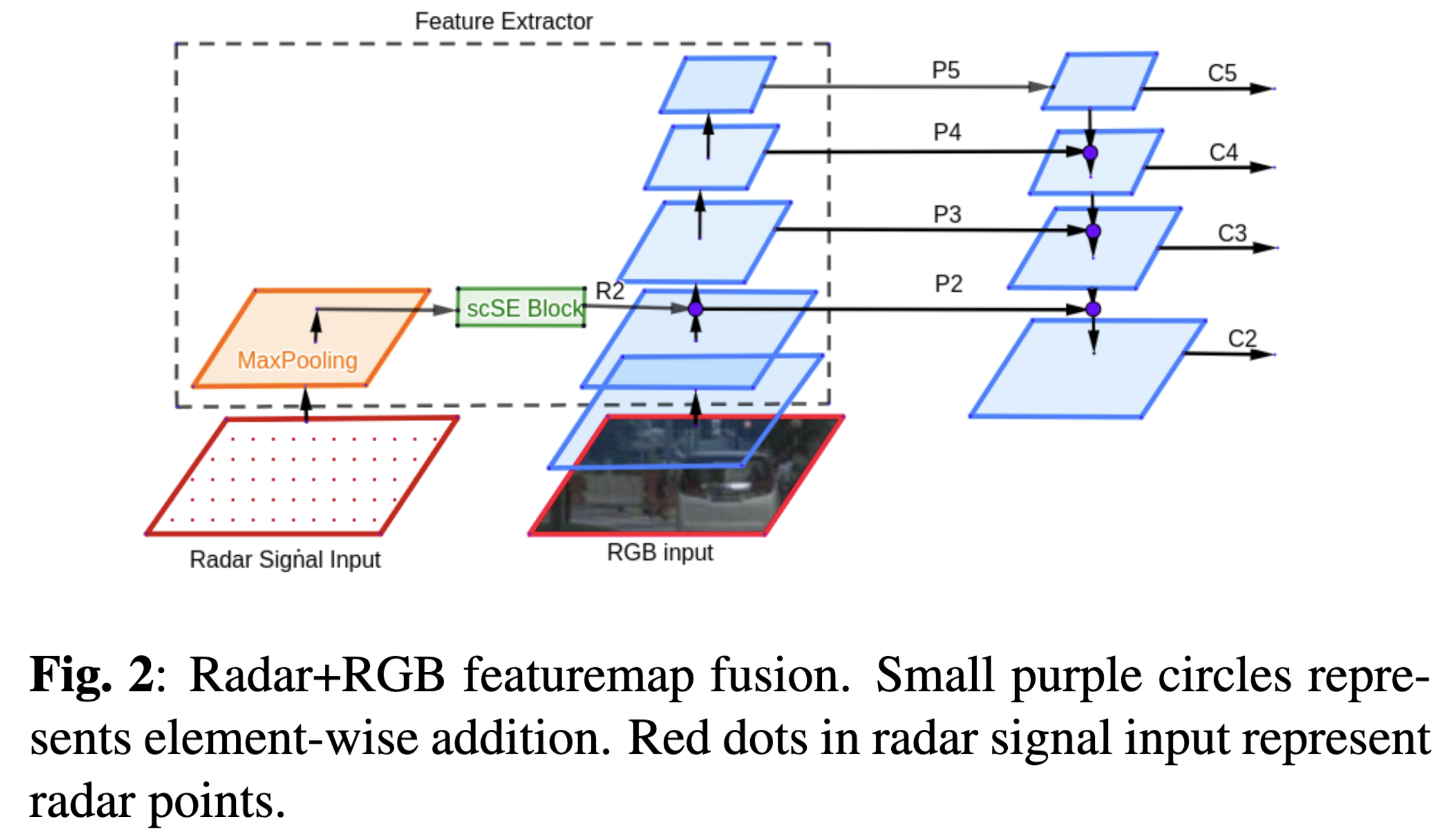
将radar点云经过内外参反投到camera view上,通过resnet提features,接着通过maxpooling下采样后经过一个scSE Block(attention),再融合到camera image对应的FPN中。
Pipeline
亿些细节
- radar点云反投camera时,点云的x, y对应feature map上的坐标,深度z则编码到对应的坐标位置。无radar点的位置编码为0
- radar features在哪个scale融合进camera,作者声明是经过一系列实验得出的。最终融合位置如上图pipeline所示
- radar-camera features融合方式为对应元素相加。
- scSE可以突出重要的局部空间信息及重要的channel,在这里作者应用在radar features提取上,以期望加强仅存在radar点云的区域。
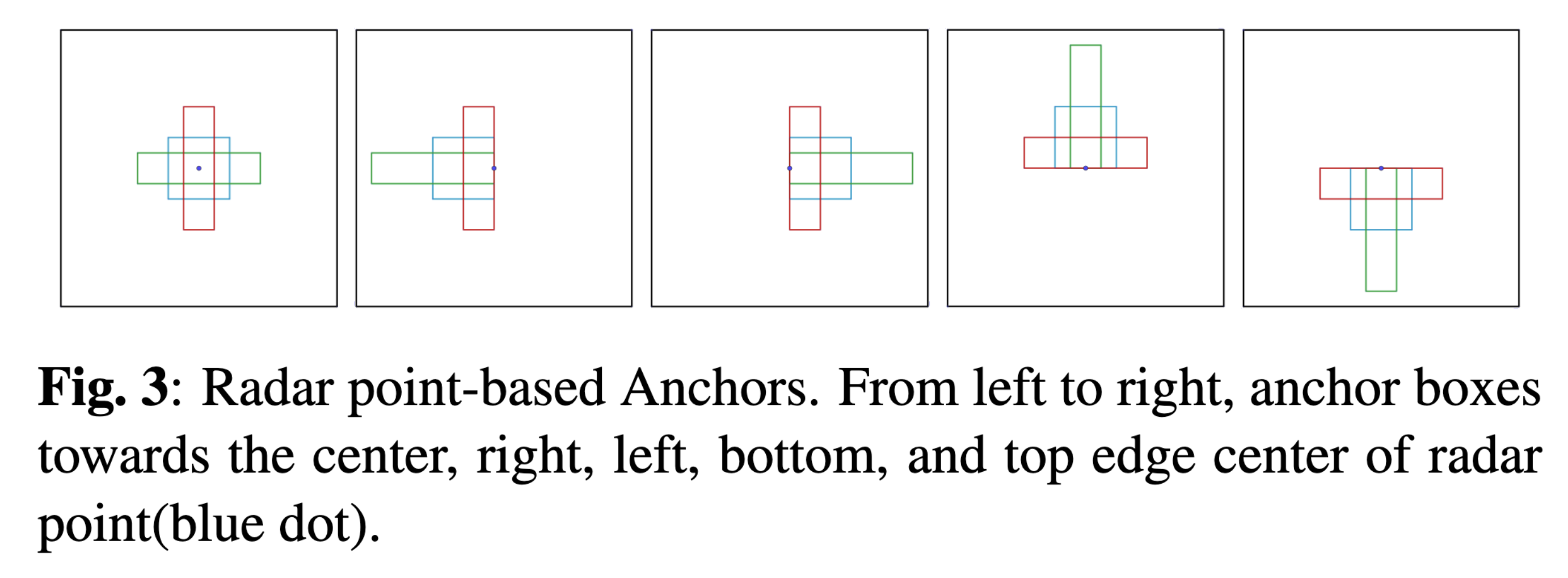
- 基于radar点云产生anchor boxes。由于radar点可能是交点或者边点,这里作者考虑了几种不同的anchor生成方式,如下图。
- 因为种种原因,不一定所有的目标都有对应的radar点,因此基于radar产生的anchor boxes很可能是不全的。这里作者提了一种融合anchor boxes的方法,简单来说就是同时基于camera image和radar产生anchor,如果radar对应的anchor box与gt的iou更大,则覆盖掉iou较小的基于image的anchor
- 作者使用nuScenes数据集,采用3d转2d方式获得2d框真值。由于很多遮挡严重的框也会被放出,这里作者通过nuScenes提供的visibility level进行了过滤,设置为2
- 本文的基础网络是Faster RCNN + FPN,预训练权重基于COCO数据集。
进一步了解
- Faster RCNN
- FPN
- Concurrent Spatial and Channel Squeeze & Excitation (scSE)
原文和代码
https://arxiv.org/abs/2008.13642
参考资料
无
本文由作者按照 CC BY 4.0 进行授权