快速了解一个网络:AssociationNet, Radar Camera Fusion via Representation Learning in Autonomous Driving
以下内容偏向于记录个人学习过程及思考,请审慎阅读。
背景
本文旨在通过representation learning解决radar点和camera image 2d检测框的关联问题。
核心思想
使用基于规则的关联算法输出结果作为真值进行监督。
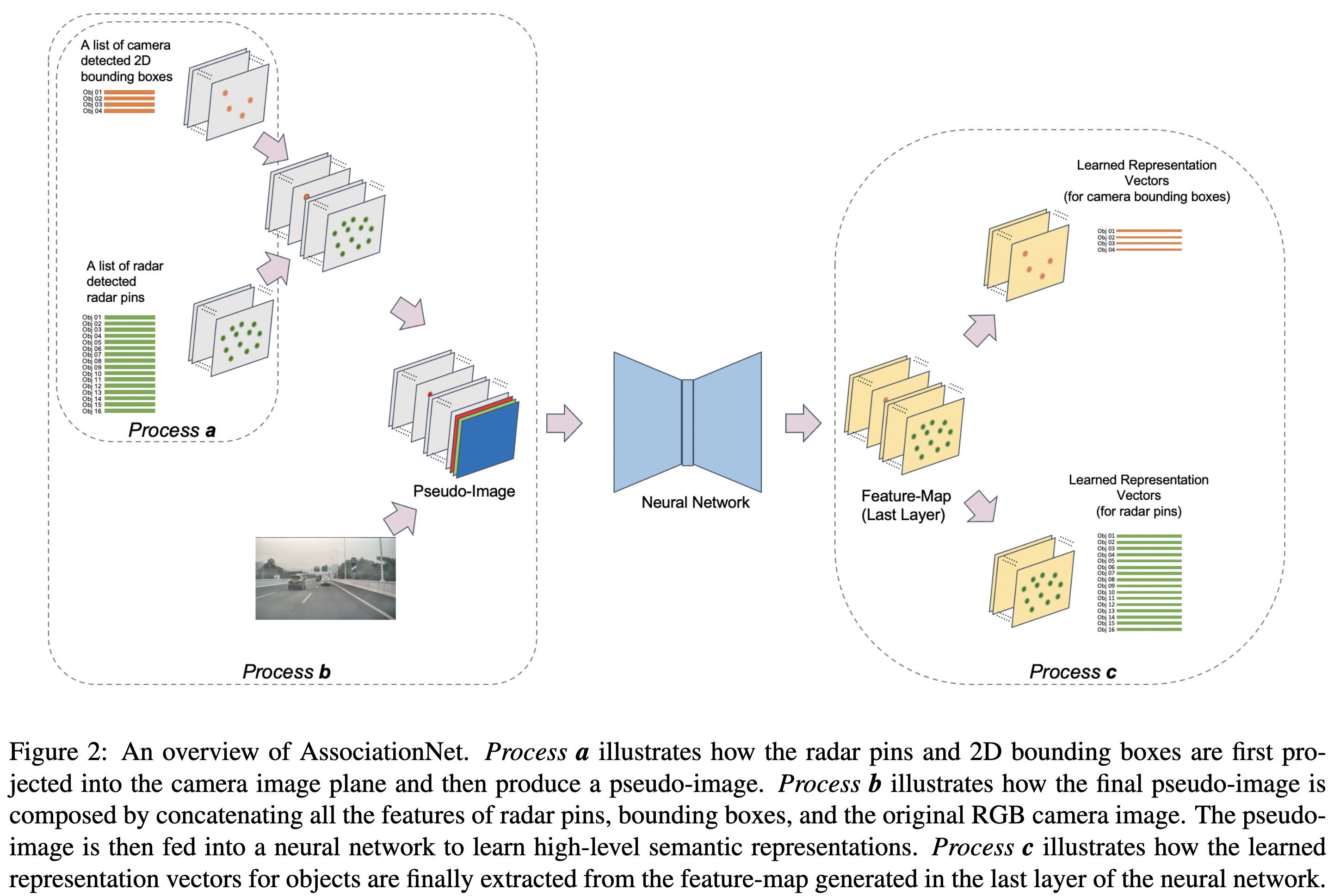
将image 2d box、radar点和原始RGB图像concat到一起,经过encode、decode结构得到feature map
将feature map分成radar和camera两部分,分别从radar点位置和2d box中心位置取对应pixel处的64个channel值作为representation vector,欧式距离比较小的两个向量则认为关联。
Pipeline
亿些细节
Radar and Camera Data Preprocessing
对于每一个camera帧,找离它最近的radar帧,并通过radar速度+匀速假设补偿一下radar位置
出2d box的网络采用RetinaNet
Deep Association by Representation Learning
将radar点和2d box都投到image plane得到pseudo-image,每个attribute占据一个channel
radar部份channels包含id, obstacle prob, pos_x, pos_y, vel_x, vel_y以及一个heatmap表示反投到图像上的位置。
2d box部份channels包含2d box的width, height, class以及一个heatmap表示2d box中心点的位置。
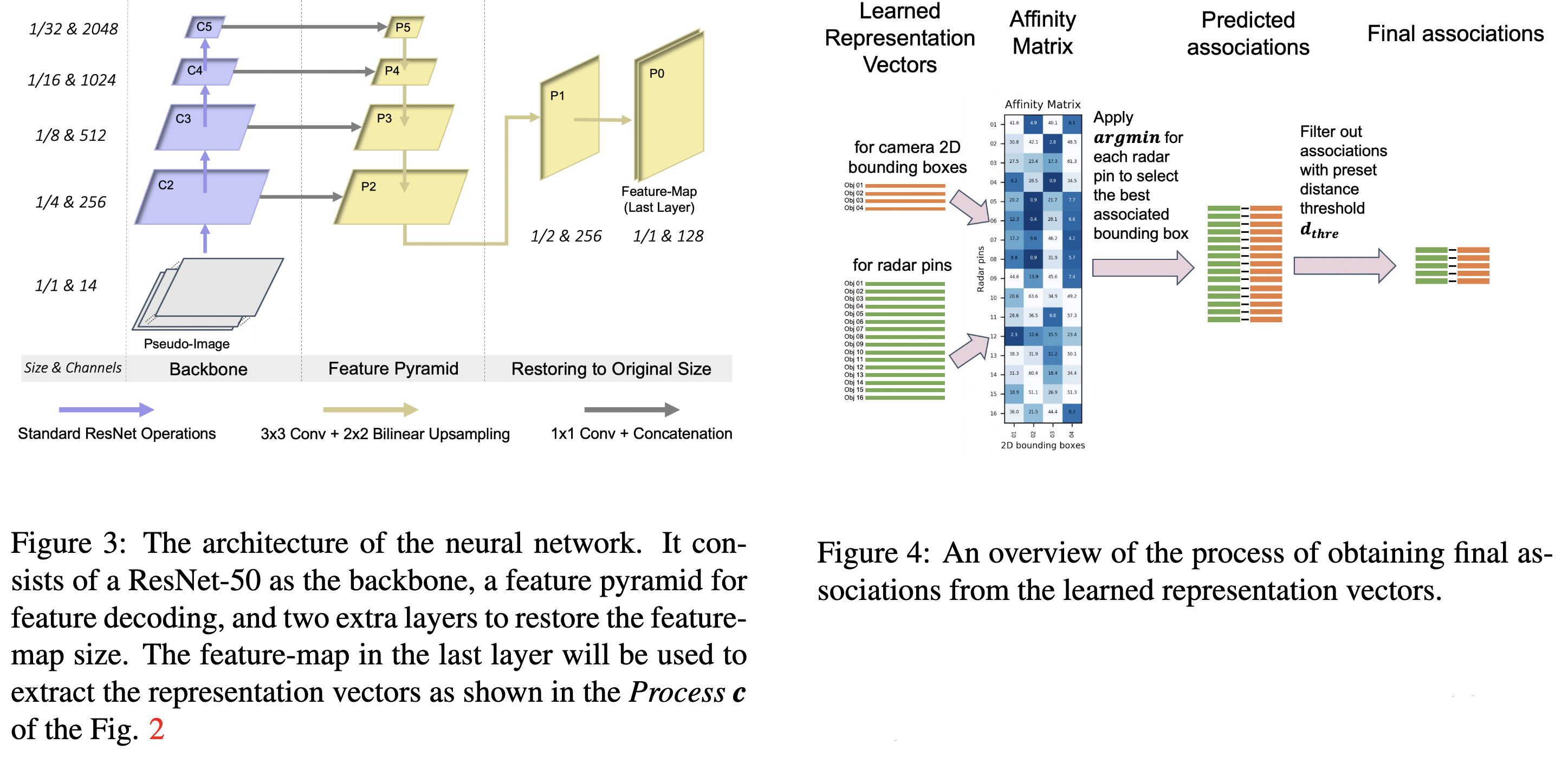
以ResNet-50为backbone,跟一个FPN用来decoding feature map,再增加额外的两层将feature map恢复成原始图像大小
输出部份为128个channel,对应radar pin和2d box的两个64维的representation vector
loss方面,用规则生成的关联关系来监督,包括pull loss和push loss,其中
- pull loss: 关联的2d box和radar点,让其representation vector的欧式距离尽可能接近一个较小的预设的阈值(本文为2.0)
- push loss: 非关联的2d box和radar点,让其representation vector的欧式距离尽可能接近一个较大的预设的阈值(本文为8.0)
Loss Sampling
因为push loss中对应的非关联的2d box和radar点数量非常巨大,因此这里随机采样一些点对来作为push loss
作者实验发现采样点对数量与pull loss中的点对数量一致时效果最好
Ordinal Loss
对于相近距离的目标,有时候近距离的radar反而会关联到较远距离的box上,因此需要引入一个ordinal loss来惩罚这种错误
作者利用了2d box底边的y坐标和radar的深度来作额外监督
2d box底边y坐标越小时,深度应当越近,因此(yi - yj)(di - dj)应当是正号,可以利用这个来增加loss,详见原文公式。
Inference
每个2d box可能关联多个radar point
但每个radar point一定关联固定的一个2d box
因此本文对每个radar point选择其对应欧式距离最小的2d box,详见Figure 4
进一步了解
- RetinaNet
- FPN
原文和代码
https://arxiv.org/abs/2103.07825
参考资料
无