快速了解一个网络:Seeing Through Fog Without Seeing Fog, Deep Multimodal Sensor Fusion in Unseen Adverse Weather
快速了解一个网络:Seeing Through Fog Without Seeing Fog, Deep Multimodal Sensor Fusion in Unseen Adverse Weather
以下内容偏向于记录个人学习过程及思考,请审慎阅读。
背景
camera的图像质量在极端天气或低光黑暗场景极为受限。
但现在并没有包含多传感器的、极端天气下的驾驶数据。
于是采了一波数据并公开,并基于“measurement entropy”提出一种多传感器融合方案
核心思想
将所有传感器输出全部反投到camera image上。
并基于measurement entropy加权进行自适应的concatenation融合
检测头采用SSD
Pipeline

亿些细节
- lidar反投到camera image上,使用深度、高度、反射强度信息
- radar反投到camera image上,因为没有高度信息,因此反投成整条线段的形式(见上图pipeline)
- 为了将融合结果自适应地导向最优的sensor,作者引入了额外的entropy信息
- 对于每个sensor,熵越大的地方,信息量越丰富,对应位置的权重越大,就达到了自适应的效果
- measurement entropy计算如下
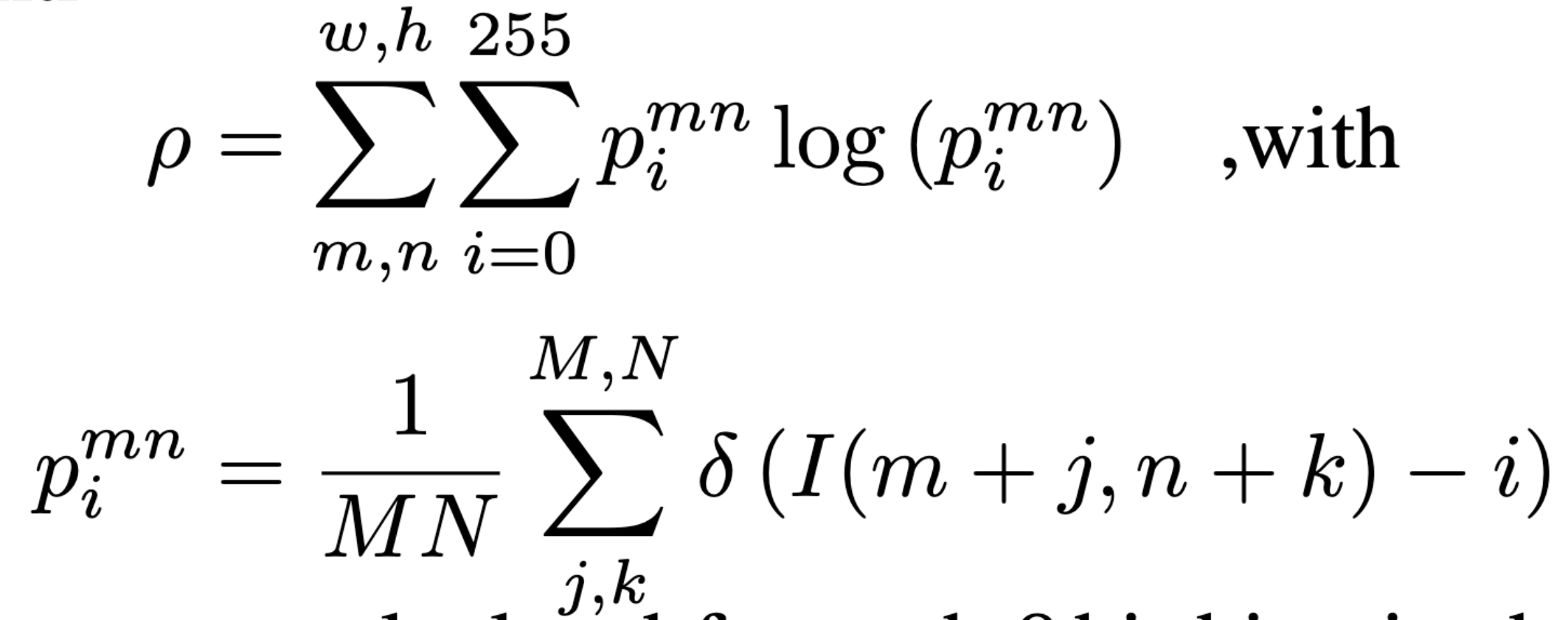
其中i范围为[0, 255],所有sensor反投到图像后都归一化到这一范围。
对于每个(m, n)像素位置,计算其右下MxN的一个patch相关的熵作为本像素位置的熵。所有位置像素熵求和为全图的熵。
- 训练过程中仅包含正常天气数据,但时间有从早到晚
进一步了解
原文和代码
https://arxiv.org/abs/1902.08913
参考资料
无
本文由作者按照 CC BY 4.0 进行授权